.svg)
.svg)




Самоторможение редукторов
Самоторможение редуктора червячного – «блокировка» передачи вращения по цепочке «выходной вал – входной вал». Благодаря ему приводное устройство не может работать наоборот. Данная функция в различной степени присутствует у всех типов червячных механизмов.
Но рассматривать свойство удобнее на примере основного его типа - одноступенчатого редуктора червячного. Поскольку одноступенчатая передача – это база проекта производства системы любой сложности.
Особенности функции задают характеристики передачи:
- объективные параметры (расположение витка);
- субъективные (материал исполнения колеса и червяка, тип смазочных расходников, точность обработки соприкасающихся/трущихся деталей, наличие вибрации).
Как работает самостоятельное торможение
.jpg")
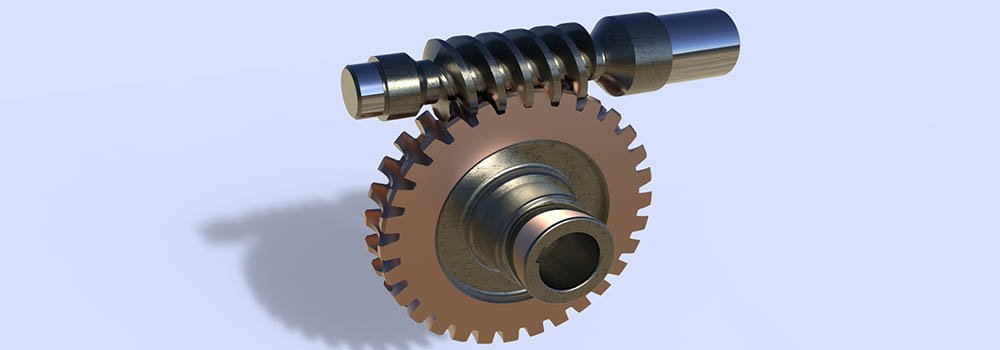
Функцию (свойство) самостоятельного торможения еще называют отсутствием обратимости. Реализовано оно просто:
- благодаря особенностям конструкции ведомый и ведущий валы являются взаимозависимыми;
- когда вращение ведущего вала прерывается, ведомый постепенно затормаживается;
- в результате останавливается вращение валов и прекращается работа механизма.
Такое свойство возникает при уменьшении угла подъема винта (происходит на передаточных числах 35+). Полное торможение наблюдается при величине угла червяка 3,5 градуса и ниже.
Типы самостоятельного торможения
Различают два вида самостоятельного торможения механизма.
- Статическое самоторможение редуктора.
- Динамическое самоторможение редуктора .
Статическое самоторможение возникает, когда угол трения совмещающихся поверхностей в покое оказывается меньше наклона/подъема витка червяка. Актуально для передаточных отношений со статическим коэффициентом полезного действия до 50%.
Динамическое самоторможение редуктора возникает при снижении уже не статического, а динамического КПД (ниже отметки 50%). Здесь неравенство уже в пользу динамического угла трения поверхностей (подъем витка червяка меньше).
Для работы с данными по торможению важно точно определить КПД редуктора червячного. Сделать это можно по следующим формулам:

где :
- h – это искомый коэффициент полезного действия (коротко – КПД) в процентах;
- & – угол подъёма червяка, измеряется в градусах;
- ß – угол трения соприкасающихся поверхностей (j=arctg (mz));
- µz– коэффициент трения деталей.
.jpg")
Коэффициент трения µz для расчета статического самоторможения редуктора червячного принимается в диапазоне 0,09–0,14. Конкретный показатель зависит от износа деталей и температуры масла (типа, состояния). Это актуально для червячной передачи стандартного исполнения (бронзовый венец колеса и стальной червяк). Угол трения при этом принимается в диапазоне 5–8 градусов.
Динамический коэффициент трения используется при расчете динамического самоторможения (когда показатели статического самоторможения теряют актуальность в силу специфики режима работы редуктора червячного – наличия внешних вибраций, рывков при запусках/остановках). Он принимается в диапазоне 0,02–0,05 (соответствующий угол– 1–3 градуса).
Такие показатели принимают для механизмов стандартной группы (обороты входного вала редуктора червячного в пределах 900–1400 оборотов/минуту). Конкретный показатель коэффициента зависит:
- от уровня нагрузки;
- качества обслуживания подвижных/трущихся деталей;
- скорости скольжения червячного колеса и угловой скорости червяка редуктора червячного;
- вида применяемых расходников (смазка).
Мотор-редуктор тоже имеет функцию обратимости (торможения). Его моделям присущи различные виды – статического самоторможения и динамического самоторможения редуктора (обратимости). Зависит это свойство от характера и особенностей исполнения червячного зацепления.
Ниже приведена таблица, с помощью которой вы сможете определить наличие или отсутствие функций статического и динамического самоторможения редуктора.
|
Вид обратимости |
Значение g |
|||||
|
1°...3° |
3°...5°
|
5°...8° |
8°...12° |
12°...25° |
более 25° |
|
|
Статическая |
Отсутствует |
Отсутствует |
Отсутствует |
Слабая |
Присутствует |
Полная обратимость |
|
В условиях вибрации |
Отсутствует |
Слабая |
Средняя |
Сильная |
Присутствует |
Полная обратимость |
|
Динамическая |
Очень слабая |
Очень слабая |
Слабая |
Сильная |
Присутствует |
Полная обратимость |
Самоторможение при разных углах наклона винтовой линии червяка
|
Угол подъема витка червяка |
Самоторможение |
|
>25° |
Общая реверсивность |
|
12° - 25° |
статическая реверсивность |
|
быстро реверсивный |
|
|
динамическая реверсивность |
|
|
8° - 12° |
переменная и статическая реверсивность |
|
быстро реверсивный при вибрациях |
|
|
динамическая реверсивность |
|
|
5° - 8° |
статическое самоторможение |
|
реверсивный при вибрациях |
|
|
легкое динамическое самоторможение |
|
|
3° - 5° |
статическое самоторможение |
|
медленно реверсивный при вибрациях |
|
|
почти динамическое самоторможение |
|
|
легкая динамическая реверсивность при вибрациях |
|
|
1° - 3° |
статическое самоторможение |
|
динамическое самоторможение |
|
|
легкая динамическая реверсивность при вибрациях |